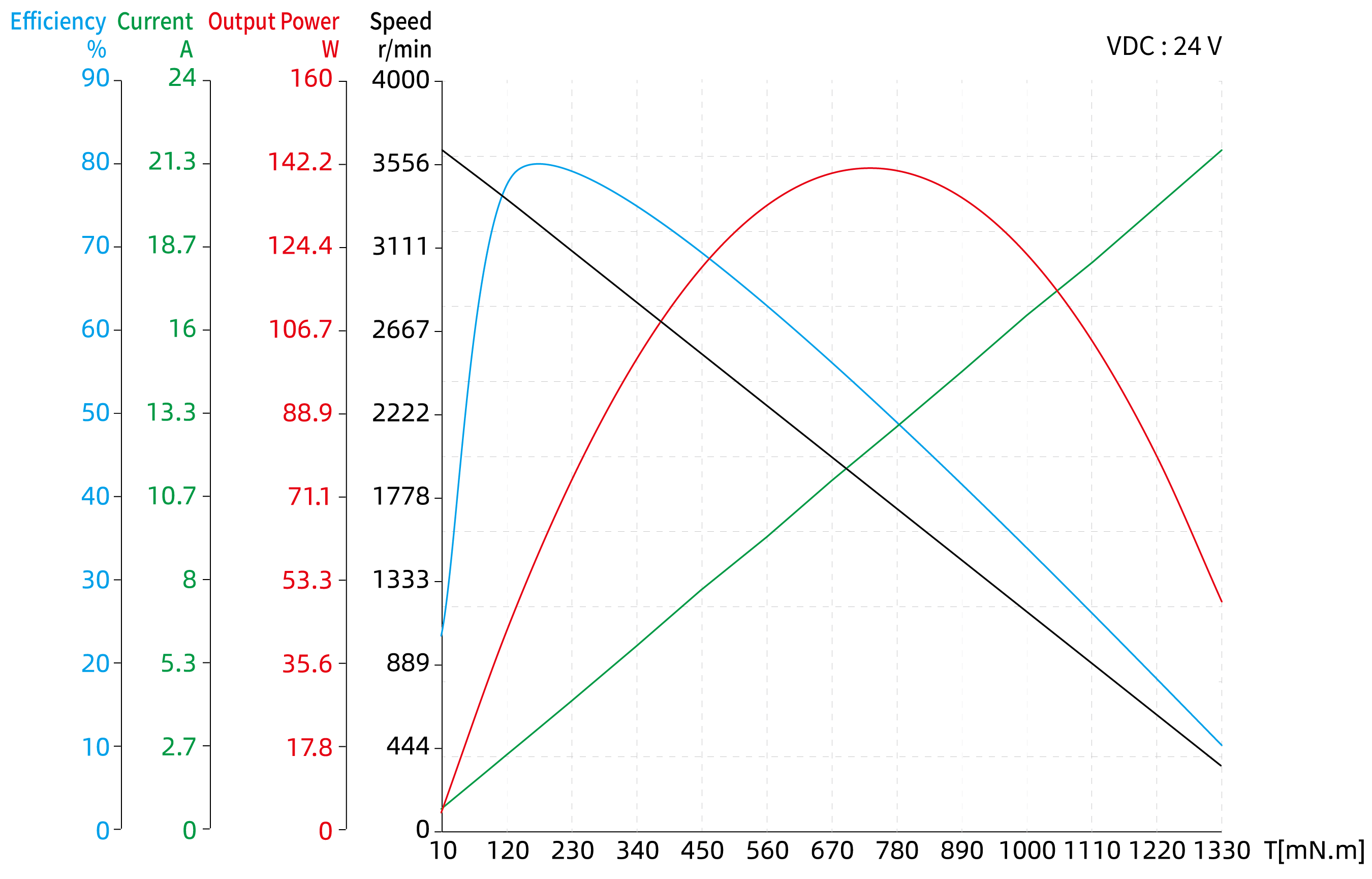
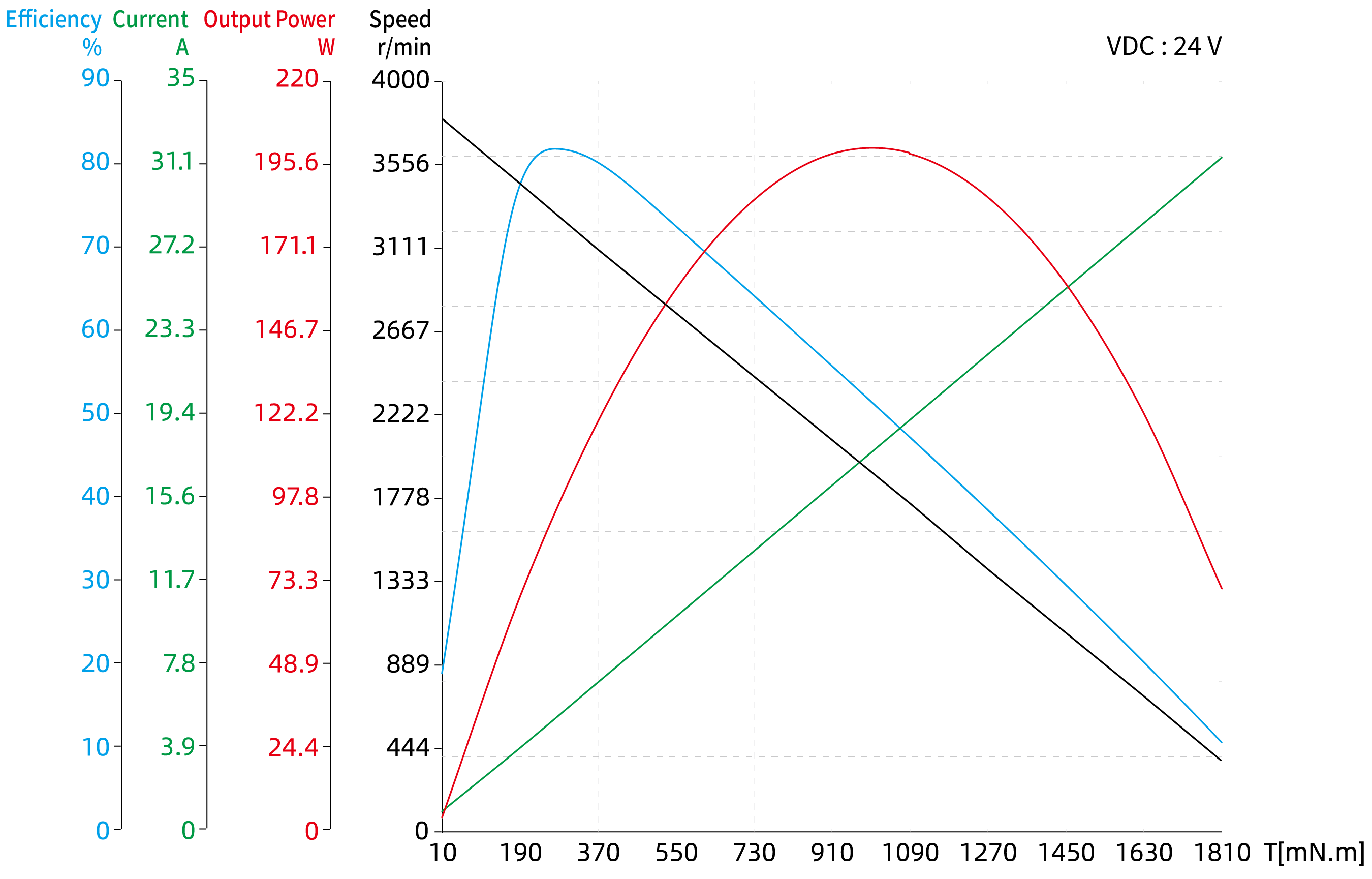
Le moteur DC sans balais de 60mm a un couple nominal maximal de 0.46N·m et peut générer une puissance nominale de 144.5W.
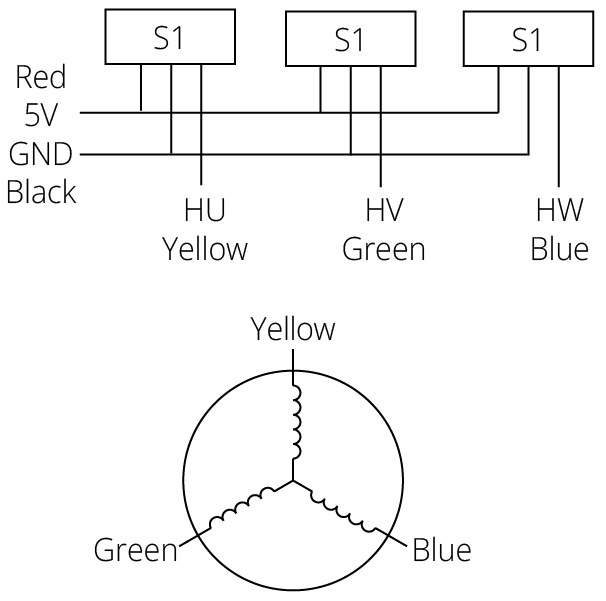
Les moteurs de 60mm ont une connexion d'enroulement en étoile et des moteurs à 5 paires de pôles avec des capteurs Hall comme méthode de retour standard.
En outre, une boîte de vitesses et un codeur incrémental sont disponibles.
.png)
Dans un environnement mobile, vous pouvez vous déplacer de gauche à droite pour voir le contenu (tableaux).
| Numéro de pièce du moteur | - | 60ZWS50X-1 | 60ZWS63X-1 | 60ZWS75X-1 | |
|---|---|---|---|---|---|
| Longueur du corps (LT) | mm | 50±1 | 63±1 | 75±1 | |
| Paire de pôles | - | 5 | 5 | 5 | |
| Résistance entre phases | Ω | 0.886 | 0.334 | 0.233 | |
| Inductance entre phases | mH | 0.682 | 0.305 | 0.183 | |
| Méthode de connexion de l'enroulement | - | En étoile | En étoile | En étoile | |
| Classe d'isolation | - | B | B | B | |
| Type de service | - | S1 | S1 | S1 | |
| Méthode de retour | - | Capteurs Hall | Capteurs Hall | Capteurs Hall | |
| Angle de commutation | - | 120° | 120° | 120° | |
| Résistance d'isolation (Tension supportée) | - | 500VAC/1KHz/1mA/1s | 500VAC/1KHz/1mA/1s | 500VAC/1KHz/1mA/1s | |
| Résistance d'isolation | - | 100 MOhm 20C | 100 MOhm 20C | 100 MOhm 20C | |
| Poids | Kg | 0.51 | 0.77 | 1 | |
| Tension nominale | V | 24 | 24 | 24 | |
| Puissance nominale | W | 47.1 | 97.4 | 144.5 | |
| Couple nominal | N·m | 0.15 | 0.31 | 0.46 | |
| Vitesse nominale | RPM | 3000 | 3000 | 3000 | |
| Courant nominal | A | 2.7 | 5.5 | 8.2 | |
| Vitesse à vide | RPM | 3500 | 3500 | 3500 | |
| Courant à vide | A | 0.29 | 0.58 | 0.87 | |
| Efficacité du moteur | % | 81.1 | 82.6 | 83 | |
| Bruit (bruit ambiant 20db, distance de test 1m) | dB | <50 | <50 | <50 | |
| Enveloppe - Résistance thermique ambiante | K/W | 0.57 | 0.28 | 0.19 | |
| Température ambiante | ℃ | 30 | 30 | 30 | |
| Température maximale de l'enroulement | ℃ | 87 | 87 | 87 | |
| Constante de couple | N·m/A | 0.056 | 0.056 | 0.056 | |
| Constante FEM inverse / Valeur efficace | V/Krpm | 5.87 | 5.87 | 5.87 | |
| Couple de pointe | N·m | 0.45 | 0.93 | 1.38 | |
| Courant de pointe | A | 8.1 | 16.5 | 24.6 | |
| Inertie du rotor | Kg·cm² | 0.22 | 0.44 | 0.66 | |
_thumb.png)
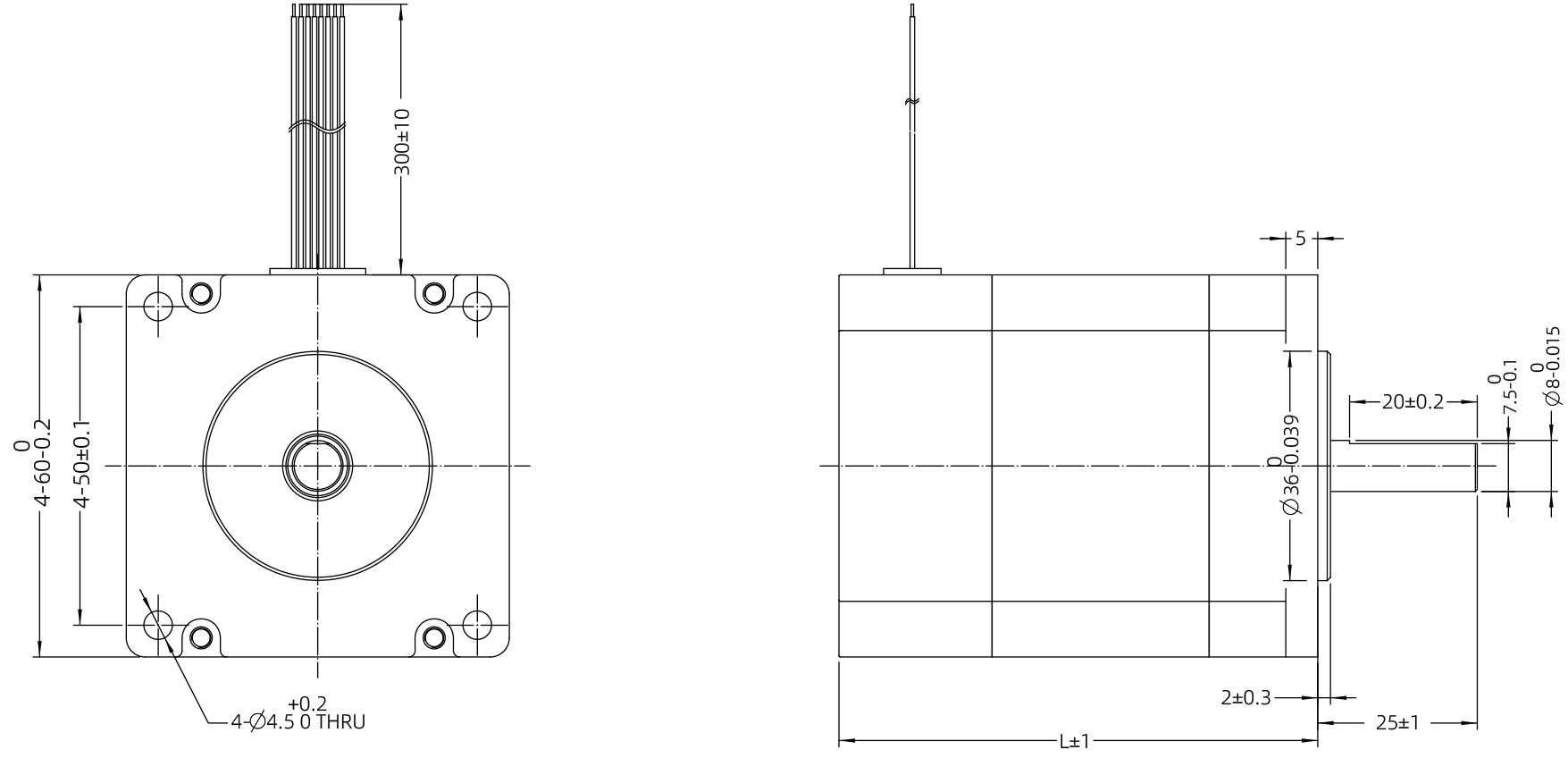
*LT : Se référer au tableau des caractéristiques du moteur
Dans un environnement mobile, vous pouvez vous déplacer de gauche à droite pour voir le contenu (tableaux).
| Type de sortie | Couleur de sortie | Fonction | |
|---|---|---|---|
| UL3265 AWG26 | Jaune | Hall U(Hu) | |
| Vert | Hall V(Hv) | ||
| Bleu | Hall W(Hw) | ||
| Rouge | Alimentation positive de Hall(Vcc) | ||
| Noir | Alimentation négative de Hall(GND) | ||
| UL3265 AWG18 | Jaune | Phase U | |
| Vert | Phase V | ||
| Bleu | Phase W | ||