Le pas désigne la distance linéaire parcourue axialement par l'écrou lors d'une révolution complète de la vis.
Un pas plus grand augmente la distance de déplacement linéaire par révolution et permet généralement d'atteindre une vitesse de déplacement plus élevée. Le pas est calculé en multipliant le pas du profil par le nombre de filets.
Le pas du profil désigne la distance axiale entre deux filets adjacents.
Dans une vis à filet unique, le pas du profil est égal au pas hélicoïdal, tandis que dans une vis à filets multiples, le pas hélicoïdal est supérieur au pas du profil. Les vis à filets multiples offrent généralement une meilleure efficacité de déplacement et des caractéristiques de transmission de puissance plus fluides.
La précision de la vis désigne l'écart cumulé entre la distance de déplacement théorique et la distance de déplacement réelle sur une longueur de référence donnée.
Par exemple, une vis avec une précision de pas de 0,004 pouce/pied peut présenter un écart de position allant jusqu'à ±0,004 pouce sur un pied de déplacement.
La précision de la vis à pas est un facteur essentiel qui influe directement sur la précision de positionnement et la répétabilité de l'ensemble du système de mouvement.
Dans les applications verticales, un phénomène de réversibilité peut survenir lorsque l'alimentation du moteur est coupée ou en l'absence de mécanisme de freinage.
Les conditions de charge gravitationnelle supplémentaire doivent également être prises en compte lors de la conception du système.
La résonance des moteurs pas à pas hybrides se produit généralement aux environs de 200 PPS. Le micropas est efficace pour réduire les vibrations et le bruit audible dans cette plage.
Les moteurs pas à pas nécessitent des variateurs externes pour fonctionner. La plupart des variateurs disponibles dans le commerce intègrent un circuit d'alimentation, des circuits logiques, des composants de commutation et des fonctions de contrôle des impulsions.
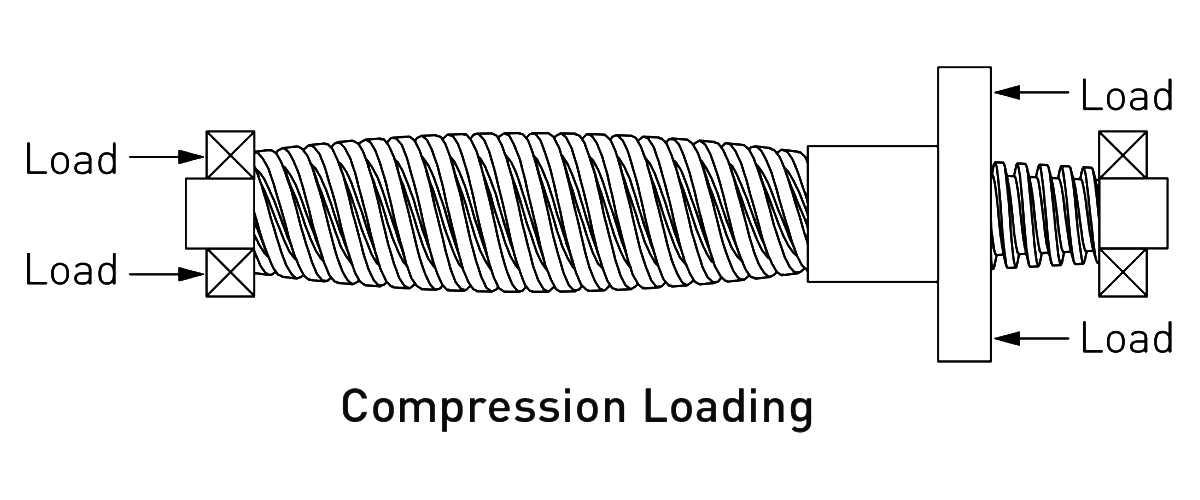
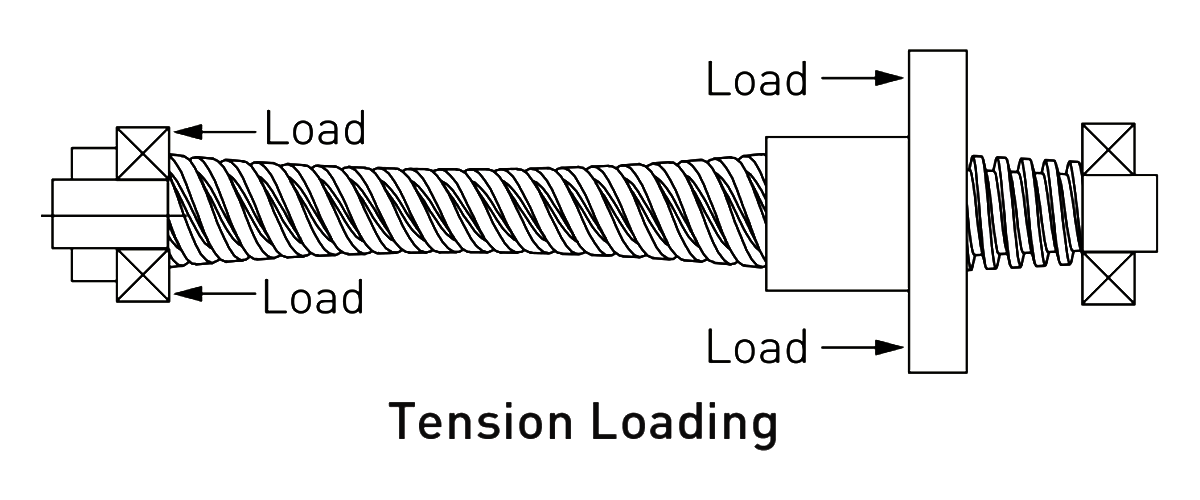
Une charge tendant à étirer la vis est appelée charge de traction, tandis qu'une charge comprimant la vis est appelée charge de compression.
Dans les conditions de charge en compression, la vis doit être conçue en tenant compte de la résistance axiale au flambement.
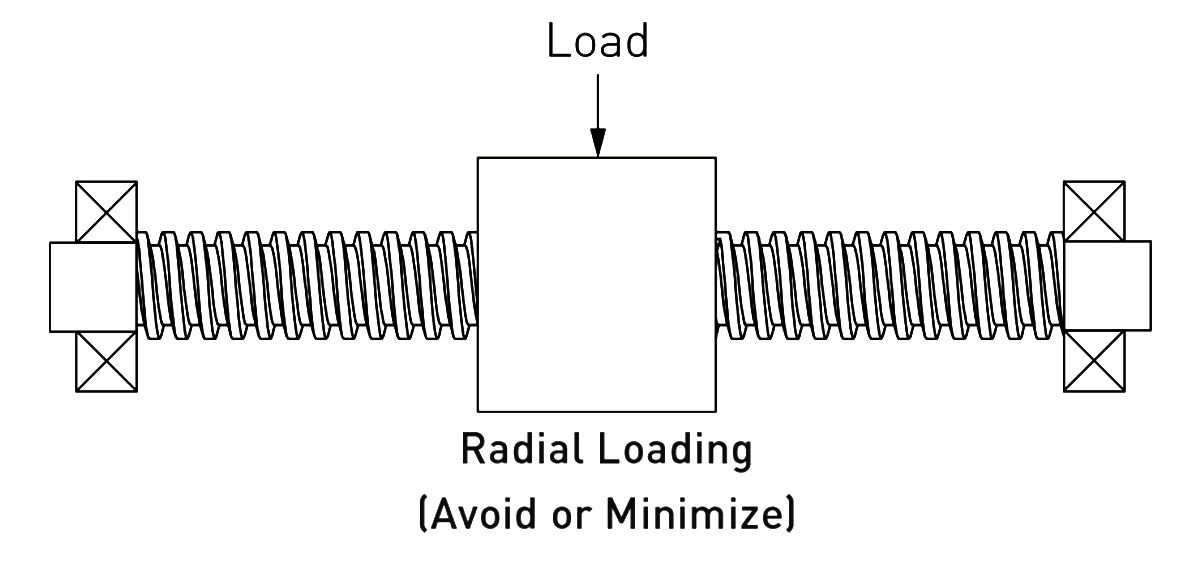
Charge appliquée perpendiculairement à l'axe de la vis. L'utilisation de mécanismes de support supplémentaires tels que des guides linéaires est recommandée.
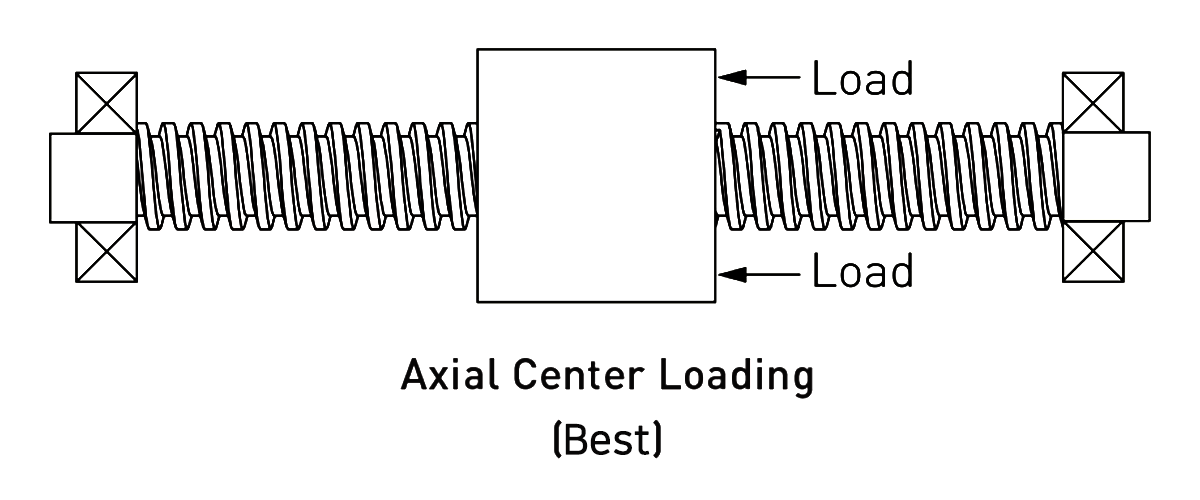
Charge appliquée dans la direction de l'axe central de la vis à pas.
La réversibilité (backdriving) est le phénomène par lequel une charge axiale entraîne la rotation de la vis ou de l'écrou dans le sens inverse. Les vis à pas avec un rendement supérieur à 50 % ont généralement une plus grande tendance à la réversibilité, tandis que celles avec un rendement inférieur à 35 % sont plus efficaces pour prévenir ce phénomène.
Des valeurs de pas plus petites peuvent réduire davantage la possibilité de réversibilité ou de rotation libre, et les systèmes verticaux sont généralement plus sensibles à la réversibilité en raison de la gravité.
Le couple moteur nécessaire pour entraîner la vis à pas est composé des éléments suivants :
Des options d'usinage des extrémités aux normes métriques et en pouces sont disponibles. Des spécifications d'usinage personnalisées sont également prises en charge selon les exigences du client. Veuillez contacter DINGS' pour toute information complémentaire.
La performance du système de vis à pas, notamment la vitesse et le rendement, peut être influencée par la manière dont les extrémités de la vis sont montées et supportées.
| Type de fixité des extrémités | Rigidité relative | Facteur de vitesse critique | Facteur critique de tige |
|---|---|---|---|
 |
Moins rigide | 0,32 | 0,25 |
 |
Rigide | 1,0 | 1,0 |
 |
Plus rigide | 1,55 | 2,0 |
 |
Très rigide | 2,24 | 4,0 |
La vitesse critique est la vitesse de rotation à laquelle la vis atteint pour la première fois sa zone de résonance en raison de son déflexion ou d'une instabilité. Des vibrations et un comportement instable du système peuvent survenir dans cette plage de vitesse. La vitesse critique peut être affectée par les facteurs suivants :
Par exemple, une vis d'un diamètre de 19,05 mm (0,75 pouce) et d'une longueur de 1778 mm (70 pouces) a une vitesse critique d'environ 187 tr/min dans les conditions d'un facteur de sécurité K = 1,25 et FS = 0,32.
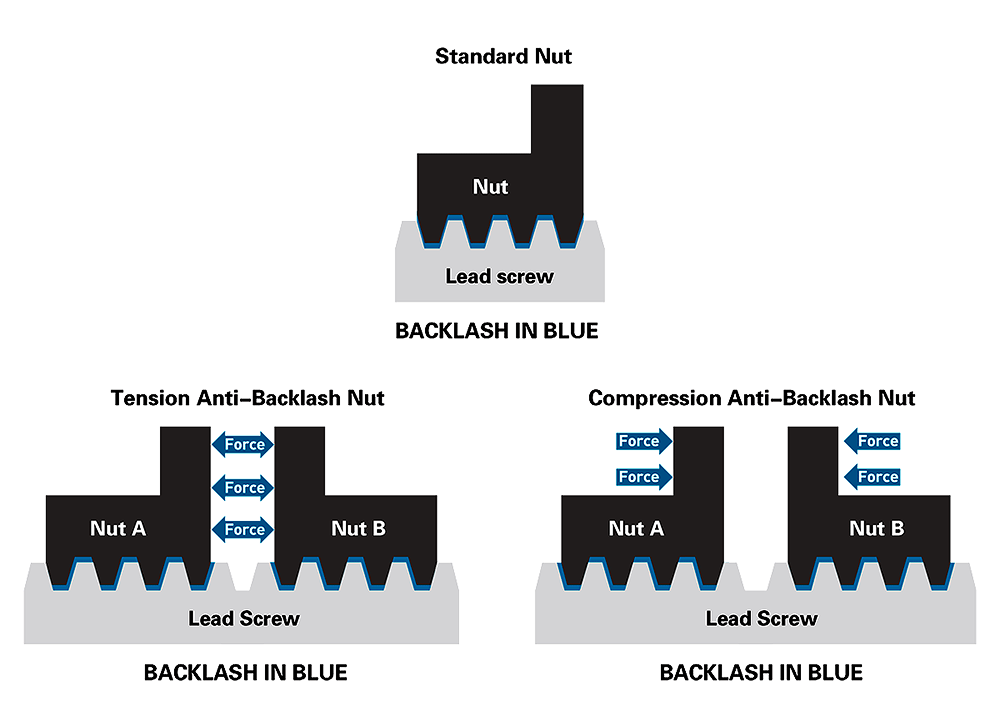
Le jeu désigne le jeu axial relatif entre la vis et l'écrou. Il est normal que le jeu augmente progressivement avec l'utilisation continue. La compensation du jeu peut être minimisée par l'utilisation d'écrous anti-jeu, et le jeu affecte principalement la précision de positionnement bidirectionnel.