Veuillez choisir le bon numéro de pièce en suivant les instructions ci-dessous.

| ① Marque DINGS' | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| ② Série |
OL = Boucle ouverte CL = Boucle fermée BV = BLDC / VCM OLB = Boucle ouverte sans balais CLB = Boucle fermée sans balais CLS = Servo boucle fermée |
||||||||
| ③ Numéro de cadre / Code de taille |
20/28/35/42/57/60 = Numéro de cadre S(x) = Série S M = Série M C(x) = Série personnalisée ST(x) = Série ST D(x) = Série D W(x) = Série W |
||||||||
| ④ Type de structure |
I = Intégré F = Autonome |
||||||||
| ⑤ Mode de contrôle |
PD = Impulsion / Direction SC = Contrôle de vitesse RS4 = RS485 CAO = CANopen ETC = EtherCAT SA = Servo Step |
||||||||
| ⑥ Nombre d'axes |
1 = Simple axe 2 = Double axe 4 = 4 axes 8 = 8 axes |
||||||||
| ⑦ Mode de l'encodeur |
I = Incrémental A = Absolu N = Aucun |
||||||||
| ⑧ Exigences de personnalisation |
00(XX) = Numéro de série personnalisé L = Montage latéral T = Montage arrière 24V = Tension du signal 24V H = Arbre creux C = Type fermé I = Incrémental A = Absolu |
||||||||
| Exemple |
|
Veuillez choisir le bon numéro de pièce en suivant les instructions ci-dessous.
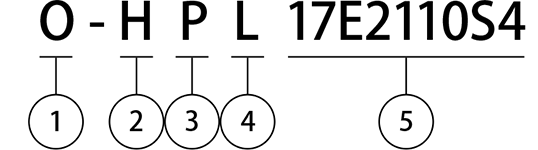
| ① Type de contrôle |
O = Boucle ouverte C = Boucle fermée |
||||
|---|---|---|---|---|---|
| ② Structure |
H = Type arbre creux B = Type fermé bloquant |
||||
| ③ Méthode de contrôle |
P = Impulsion/Direction S = Régulation de vitesse R = Communication RS485 C = Communication CANopen E = Communication EtherCAT |
||||
| ④ Type de montage | L = Montage latéral T = Montage arrière |
||||
| ⑤ Modèle de produit | |||||
| Exemple |
|